Paper总结 - Relational Representation Learning for Dynamic (Knowledge) Graph: A Survey
This paper did a detailed survey on Representation Learning on (Knowledge) Graph. It gives a valid devolopment progress on static KGRL and makes a summary on approaches of Dynamic Graph Representation Learning. They describes existing models from an encode-decode perspective and categorize these encoders and decoders based on the techniques they employ.
And in the end they highlighr directions for future research.
Firtly I want present the devolope line of KGRL. (Understanding big picture of KGRL is very necessary!!)
In this section I present several definations:
Dynamic Graph (Not KG):
- Continuous-time dynamic graph (\(CTDG\)): \(CTDG = (G,O)\), \(G\) representes graph at time \(t_1\), \(O\) represents several observations occur after \(t_1\). This defination of dynamic graph can capture all the changes happened over time.
- Discrete-time dynamic graph (\(DTDG\)): \(DTDG = (G_1, G_2, ..., G_n)\). Each \(G_i\) is a snapshot and representes graph at time \(i\). \(DTDG\) may not capture all the changes on a graph because there may be a time interval between two adjacent snapshots.
We call both \(CTDG\) and \(DTDG\) dynamic graph. Most existing models for dynamic learning is on \(DTDG\) because it is easier.
KGs: I think I am a bit of familiar with.
General Tasks for Dynamic graphs:
- Node classification
- Graph complement/Link prediction: main task of KGs
- Graph classification
Streaming scenario: A model may not have enough time to retrain compeletly or in part when new observations arrive. Streaming scernarios are often best handled by \(CTDGs\).
Encoder-decoder framework for static graph and KGs:
Decoders for static graph: very simple
- average of two vectors
- element-wise multiplication of two vectors
- element-wise absolute value of the difference of the two vectors
- elemet-wise squared value of the difference of the two vectors
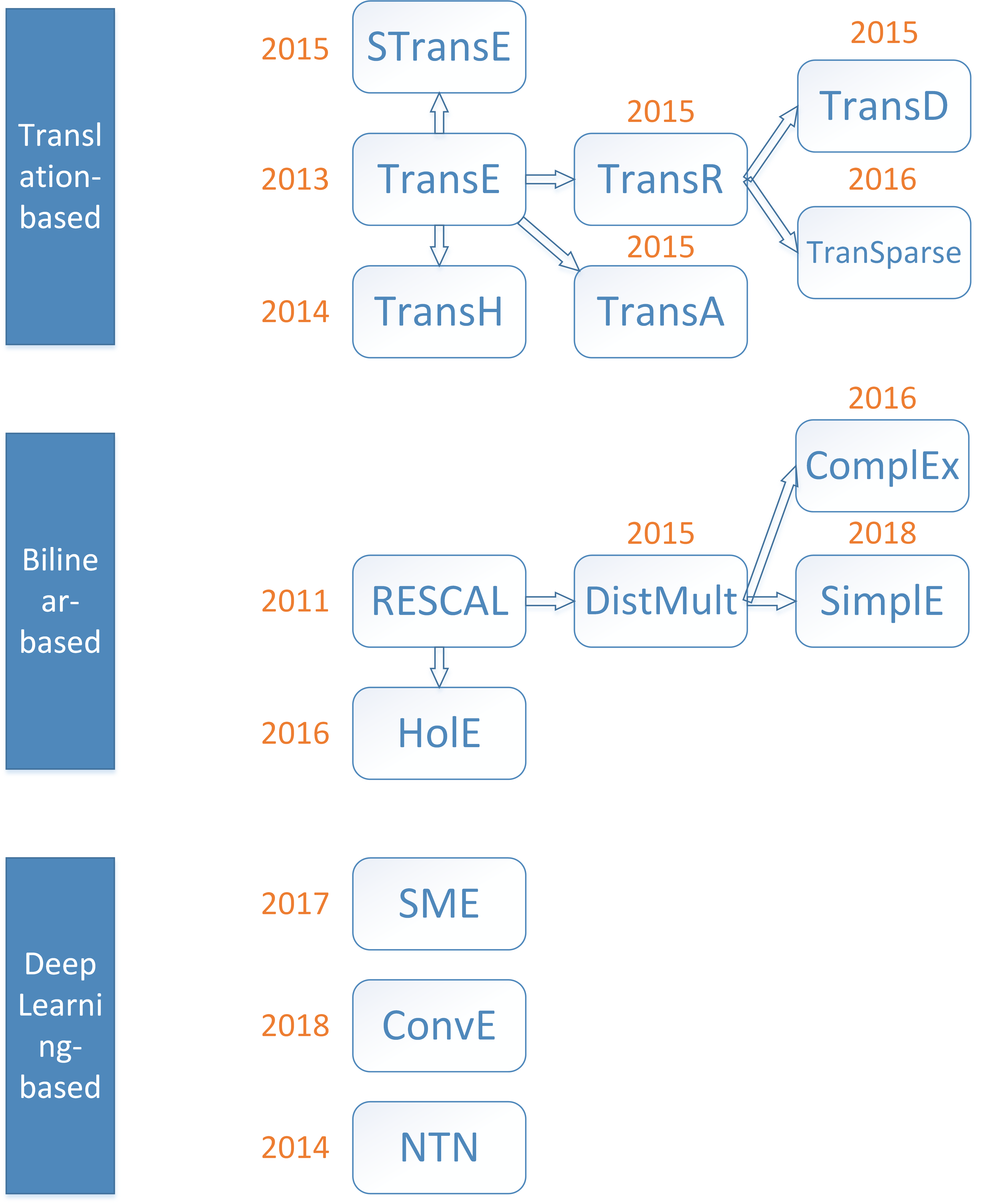
Decoders for static KGs: much more complex. Examples of each catelogue is shown in previous picture.
- Translation-based models
- Bilinearity-based models
- Neural network-based models
Encoders for static graph:
- High-Order Proximity Matrices: an extension of adjacency matrices
- Shallow Encoders
- Decomposition Approaches: its idea is that connected nodes are close to each other in the embedded space.
- Random Walk Approaches
- Autoencoder Approades:
- GCN Approaches
Encoders for static KGs: very few compared to static graph
- shallow encoders
- GCNs: such as R-GCN
Encoder-decoder framework for dynamic graph: (Note that no Encoders and Decoders of dynamic KGs are introduced in this survey paper).
Decoders for dynamic graph: I know nearly nothing about this.
- Time -predicting decoders
- Time-conditioned decoders
- Staleness
Encoders for dynamic graph:
- Aggregating Temporal Observations
- Aggregating Static Features
- Time as a Regularizer
- Decomposition-based Encoders
- Random Walk Encoders
- Sequence-Model Encoders
- Autoencoder-based Encoders
Applications, Datasets and Codes
Applications:
- Link prediction
- Entity/relation prediction
- Recommender Systems
- Time Prediction
- Node classfication
- Graph classification
- Network clustering
- Question/query answering
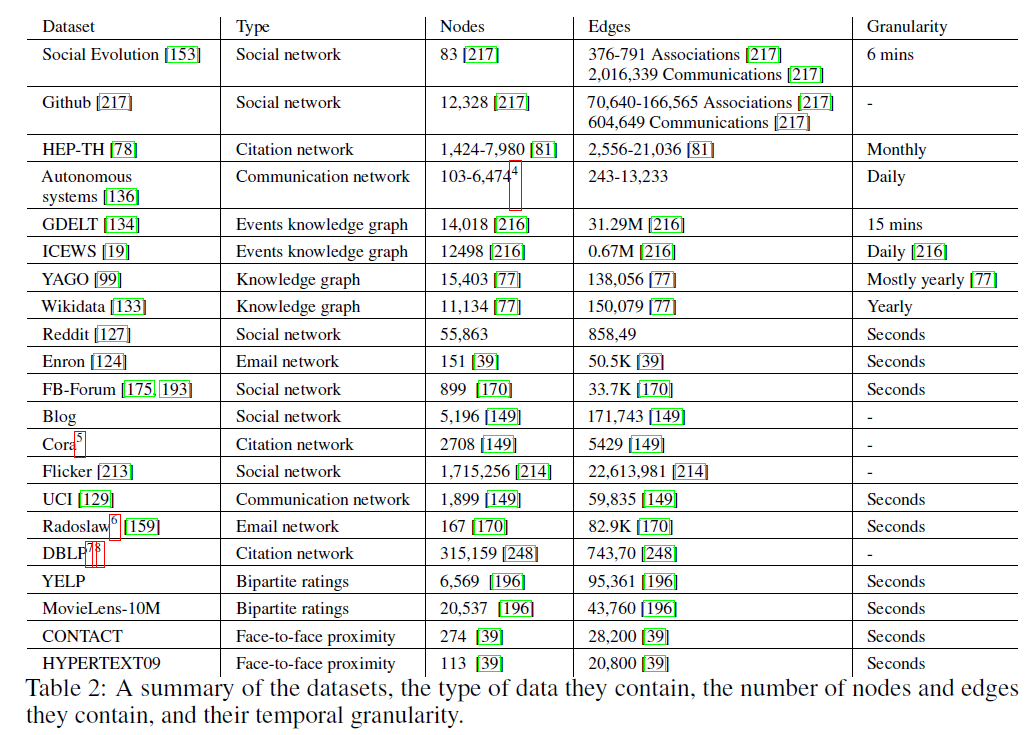
Datasets: A collection of datasets used for research on static and dynamic graphs.
Future Direction:
- The best way to extend the existing models for daynamic graph to KGs is still not clear!
- Currently representation learning algorithms have been mostly designed for \(DTDG\), with only few works on \(CTDG\).